Brake setting
Brake is a mechanism that prevents the servo motor shaft from moving when the servo drive is not in operation, keeping the motor locked in position and prevent moving due to their own weight or external forces.
Brake wiring
Servo motors are commonly used as electromagnetic brake systems. Generally, the electromagnetic brake power supply have no polarity, and users need to prepare a 24V power supply. The standard connection example of brake signal BK and the brake power supply wiring is shown in the following figure:
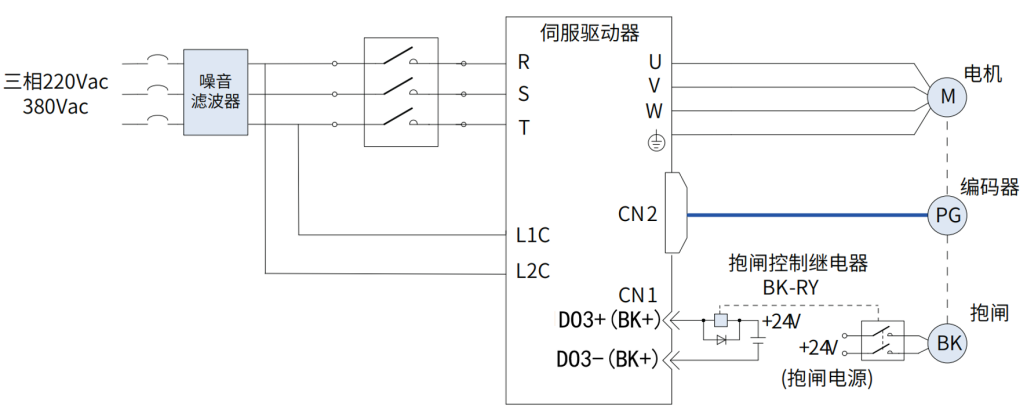
Figure 5.18 brake wiring diagram
Taking OMURBKK's MY2N-J as an example, the actual wiring of the servo is shown in the diagram:
Figure 5.19 Physical Wiring Diagram of Brake
The brake signal line+24V enters from DO3+ ,DO3- connected to relay pin 14. Relay pin 13 is connected to -24V ,so that complete the control circuit.Brake cable “+” terminal end connect 8,” -” terminal end connect 5. During normal use, 14 and 12 short circuited, 13 and 9 short circuited, so that provide power for the brake .
Precautions for brake wiring:
The length of the motor brake cable needs to fully consider the voltage drop caused by cable resistance, and the brake operation needs to ensure that the input voltage is at least 21.6V.
It is best not to share the power supply with other electrical appliances to prevent voltage or current drops caused by the operation of other electrical appliances, which may ultimately lead to brake misoperation.
Recommend using cables of 0.5mm ² or larger.
Brake software settings
For servo motors with brakes, one DO terminal of the servo driver must be configured as the brake output, and the effective logic of the DO terminal must be determined.
Code | Name | Set range | unit | value | Effective Mode | Set mode | Relevant Mode |
|---|---|---|---|---|---|---|---|
P02-02 | DO3 terminal function selection | 10-brake | -- | 1 | Effective immediately | Set anytime | Ordinary user |
brake problem
The common problems with the brake of servo motors during the running or stop process include the following:
⑴servo power on process
When the power on,the servo motor will first be powered on and then the brake will be opened. Generally, there will be a phenomenon of the Z-axis load falling down. If the servo is in position mode, the Z-axis will return to its initial position before falling. If the servo operation mode is not in position mode, the Z-axis load will remain in the stop position, which is a normal phenomenon.
To reduce the drop distance, the rigidity level P03-01 can be appropriately increased or the PE-60 torque gravity compensation value can be set after confirming the Z-axis weight.
Code | Name | Set range | unit | value | Effective Mode | Set mode | Relevant Mode |
|---|---|---|---|---|---|---|---|
P03-01 | Rigidity level | 0~31 | -- | 12 | Effective immediately | Set anytime | Ordinary user |
P0E-60 | gravity compensation value | -1000~1000 | ‰ | 0 | Effective immediately | Set anytime | Ordinary user |
⑵Servo power-off process
When the servo drive is powered off normally and there is no alarm, the servo will continue to enable for a period of time, waiting for the brake to close before disconnecting the enable. Due to the tens of milliseconds required for the intermediate relay action, the Z-axis load may drop a certain distance downwards influence by high-speed operation or static related parameter settings. To reduce the distance of falling or avoid falling, optimization can be achieved by setting P00-15 = 1, increasing the rigidity level P03-01 appropriately, increasing PA-11, and decreasing PA-12.
Code | Name | Set range | unit | value | Effective Mode | Set mode | Relevant Mode |
|---|---|---|---|---|---|---|---|
P00-15 | Fast power outage, discharge failure | 0-Enable power-off and fast power outage function 1-disable Power-off and fast power outage function | 0 | Effective immediately | Set anytime | Ordinary user | |
P03-01 | Rigid level | 0~31 | -- | 12 | Effective immediately | Set anytime | Ordinary user |
P0A-11 | Brake safety speed | 0~3000 | rpm | 30 | Effective immediately | Set anytime | Ordinary user |
P0A-12 | The longest waiting time for the brake to close after the servo is power off | 1~1000 | ms | 500 | Effective immediately | Set anytime | Ordinary user |
(3)Fault shutdown process
If one type of fault occurs during the operation of the servo, it is possible that the high Z-axis load speed may cause the brake to not close in time, resulting in accidents where the load collides with the equipment. To avoid collisions, optimization can be achieved by increasing PA-11 and decreasing PA-12 parameters.
Code | Name | Set range | unit | value | Effective Mode | Set mode | Relevant Mode |
|---|---|---|---|---|---|---|---|
P0A-11 | Brake safety speed | 0~3000 | rpm | 30 | Effective immediately | Set anytime | Ordinary user |
P0A-12 | The longest waiting time for the brake to close after the servo is turned off | 1~1000 | ms | 500 | Effective immediately | Set anytime | Ordinary user |
If the second type of fault occurs during the operation of the servo,In addition to modifying the parameters of PA-11 and PA-12, optimization can also be achieved by setting parameter PA-02 = 2 and P00-15 = 1, and selecting zero speed shutdown.
(4)Enable first and then immediately disable Z-axis drop (or disable due to servo failure after enabling)
When the motor in enabled status, the speed higher than the PA-11 speed threshold. If disable suddenly at this time, due to the high motor speed, the brake cannot be closed, which may also cause the Z-axis load to drop. At this time, the problem can be solved by increasing the value of PA-11 or decreasing the value of PA-12, but it should be noted that the set value should be within a reasonable range, otherwise it will reduce the service life of the motor brake.
Code | Name | Set range | unit | value | Effective Mode | Set mode | Relevant Mode |
|---|---|---|---|---|---|---|---|
P0A-11 | Brake safety speed | 0~3000 | rpm | 30 | Effective immediately | Set anytime | Ordinary user |
P0A-12 | The longest waiting time for the brake to close after the servo is turned off | 1~1000 | ms | 500 | Effective immediately | Set anytime | Ordinary user |
(5)After power on, the servo was not enabled but the brake was opened
Firstly, check the servo parameter P13-30 and confirm the output status of the servo brake IO point; Then check whether the IO wiring DO+/DO- of the servo brake control signal is reversed. Because of the servo protection circuit in the DO output, reverse wiring can cause the brake control signal to misguide and lead to the problem of the brake opened but the servo is not enabled.
Code | Name | Set range | unit | value | Effective Mode | Set mode | Relevant Mode |
|---|---|---|---|---|---|---|---|
P13-30 | Monitor output signal DO | 0~65535 | -- | 0 | Read | read | Ordinary user |
(6)The power on servo enable but brake cannot be opened
Firstly, check the servo parameter P13-30 and confirm the output status of the servo brake IO point; Check if the wiring of the brake cable is normal, if the servo power supply is stable and greater than 21.6V. After confirming that there are no errors, check whether the DO function is set to the brake function and if the brake logic is set correctly.
Code | Name | Set range | unit | value | Effective Mode | Set mode | Relevant Mode |
|---|---|---|---|---|---|---|---|
P13-30 | Output signal monitoring DO | 0~65535 | -- | 0 | read | read | Ordinary user |
P02-02 | DO3 terminal function selection | 10-brake | -- | 1 | Effective immediately | Set anytime | Ordinary user |
Troubleshooting of Brake Issues
1.Open the power on brake directly:
Pay attention to checking if the DO wiring is reversed. Reverse wiring can affect the servo IO logic and cause false triggering of the brake signal. If the enable signal is not given but the brake is in the open state when powered on, it is highly likely that the DO wiring is reversed.
2.The brake cannot be opened:
Check if the wiring of the brake cable is normal, if the servo power supply is stable and greater than 21.6V. After confirming that there are no errors, check if the DO function is set to the brake function and if the brake logic is set correctly.