Instructions for using multi-stage position mode
The servo drive has a multi-stage position operation function, and the R8 servo drive stores 16 segments of position instructions internally. The displacement, maximum operating speed, and acceleration/deceleration time of each segment can be set separately. The waiting time and connection method between each section can also be selected according to actual needs. The setting process is as follows:
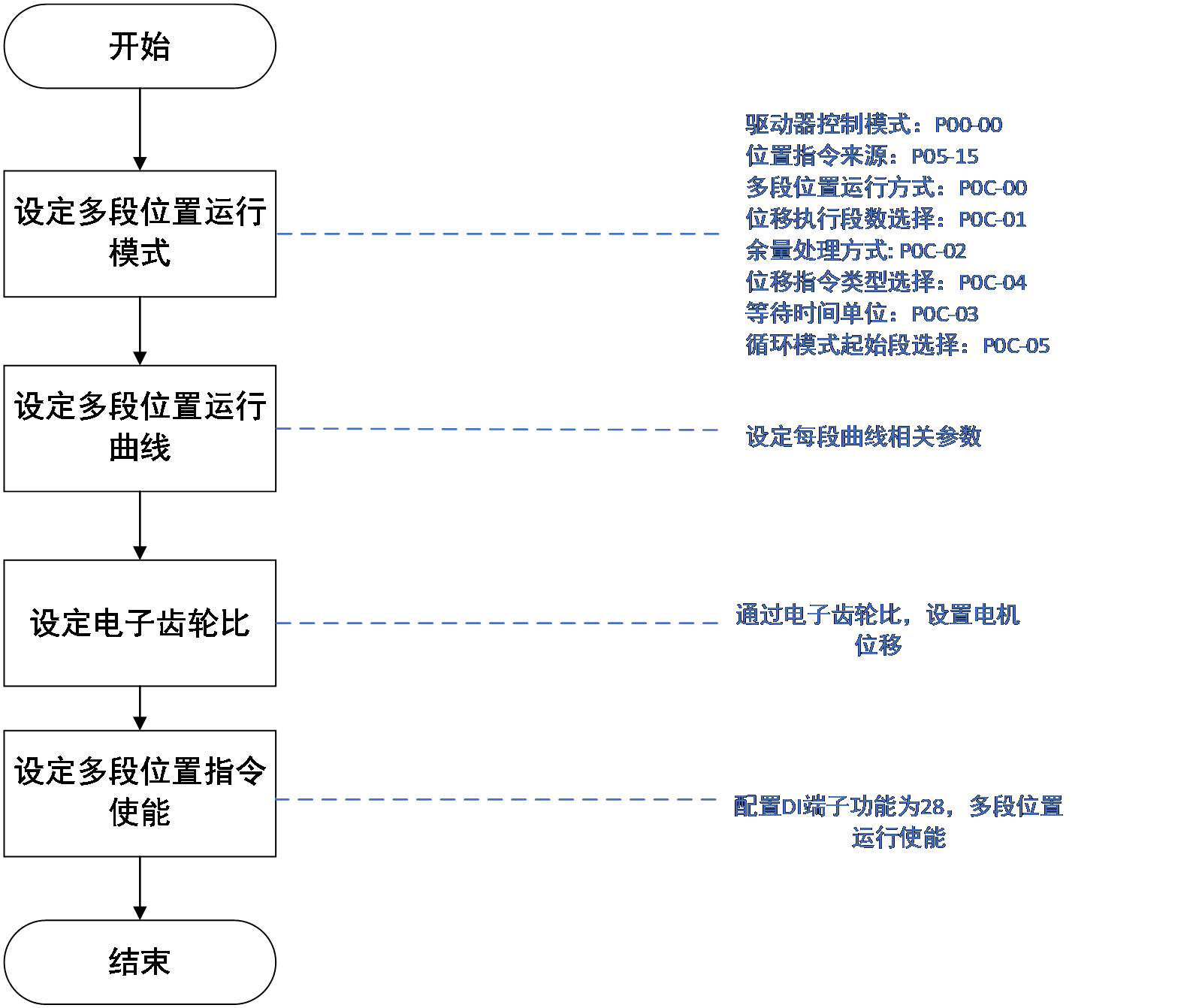
Figure 5.14 Multi segment position mode setting process
Code | Name | Set range | unit | value | Effective Mode | Set mode | Relevant Mode |
P00-00 | Mode selection | 0-position mode 1-Speed mode 2-Torque mode 3-Position and velocity mixed mode 4-position and torque hybrid mode 5-speed and torque hybrid mode 6-Mixed mode of position, speed, and torque 7- Reserved 8-EtherCAT bus mode | - | 0 | Effective immediately | Stop set | ALL |
P01-04~07 | DI terminal function selection | 0~40 | - | 0 | Effective immediately | Stop set | ALL |
P05-15 | Location instruction source | 0-Low speed pulse input 1. High speed pulse input 2-Division output OA, OB signals 3- Constant at 0 4- Internal multi-stage pulse input | - | 0 | Effective immediately | Stop set | ALL |
P0C-00 | Multi position operation mode | 0-single circle operation stop 1-Loop operation 2-DI switching operation 3- Sequential operation (without delay between segments) | -- | 1 | Effective immediately | Stop set | Ordinary user |
P0C-01 | Selection of displacement execution segments | 1~16 | -- | 2 | Effective immediately | Stop set | Ordinary user |
P0C-02 | Remaining processing method | 0- Include in the next segment 1. Enter the next segment and ignore the remaining amount in this segment | -- | 0 | Effective immediately | Stop set | Ordinary user |
P0C-03 | Waiting time unit | 0-(ms) 1-(s) | -- | 1 | Effective immediately | Stop set | Ordinary user |
P0C-04 | Selection of displacement command type | 0-Relative displacement 1- Absolute displacement | -- | 0 | Effective immediately | Stop set | Ordinary user |
P0C-05 | Selection of starting segment for loop mode | 0~16 | -- | 0 | Effective immediately | Stop set | Ordinary user |
P0C-10 ~ P0C-40 | The displacement of the (1-16) segment | -1073741825~1073741824 | ins | 0 | Effective immediately | Stop set | Ordinary user |
P0C-42 ~ P0C-57 | Moving speed of section(1-16) | 1~6000 | rpm | 200 | Effective immediately | Stop set | Ordinary user |
P0C-58 ~ P0C-73 | The acceleration and deceleration time of the (1-16) segment movement | 0~65535 | Ms or s | 1 | Effective immediately | Stop set | Ordinary user |
P0C-74 ~ P0C-89 | Waiting time after the completion of the (1-16) segment shift | 0~10000 | Ms or s | 10 | Effective immediately | Stop set | Ordinary user |