Instructions for using multi-stage speed mode
The servo drive has the function of operating at multiple speeds. The R8 servo drive stores 16 speed commands internally, and the maximum running time and running time of each segment can be set separately. The setting process is as follows:
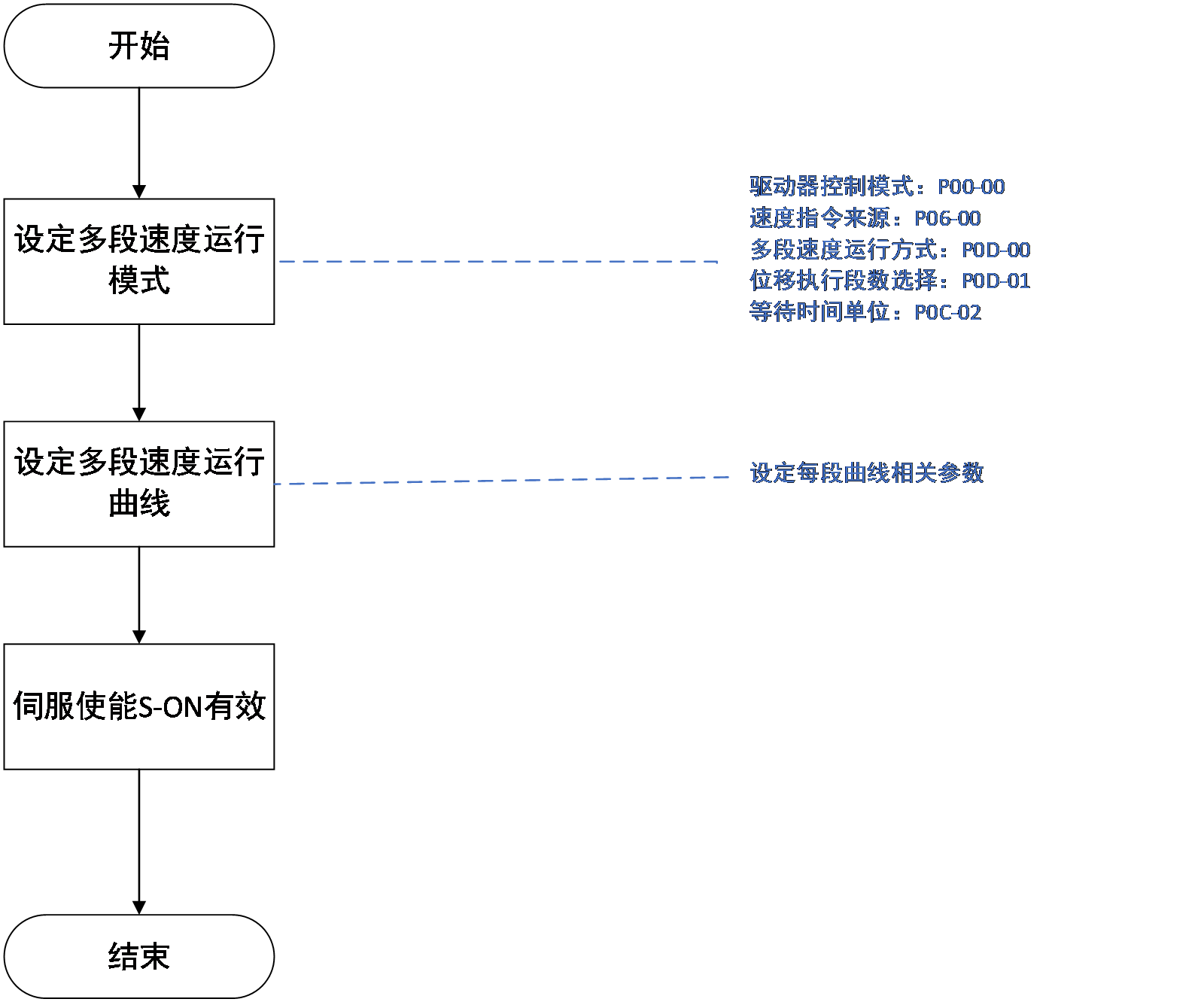
Figure 5.15 Multi speed mode setting process
☆relevant code
Code | Name | Set range | unit | value | Effective Mode | Set mode | Relevant Mode |
P00-00 | Mode selection | 0-position mode 1-Speed mode 2-Torque mode 3-Position and velocity mixed mode 4-position and torque hybrid mode 5-speed and torque hybrid mode 6-Mixed mode of position, speed, and torque 7- Reserved 8-EtherCAT bus mode | - | 0 | Effective immediately | Stop set | ALL |
P06-00 | Source of speed command | 0-Speed command A 1-Speed command B 2-Speed command A+Speed command B 3-Switch between speed command A and speed command B | -- | 0 | Effective immediately | Stop set | Ordinary user |
P0D-00 | Multi segment speed command operation mode | 0-Single run, shutdown upon completion of run 1-Loop operation 2. Switching operation interruption through external DI signal | -- | 1 | Effective immediately | Stop set | Ordinary user |
P0D-01 | Selection of End Segment amount for Speed Command | 1~16 | -- | 16 | Effective immediately | Stop set | Ordinary user |
P0D-02 | Selection of Running Time Unit | 0-0.1s 1-0.1min | -- | 0 | Effective immediately | Stop set | Ordinary user |
P0D-05 ~ P0D-08 | Acceleration time 1-4 | 0~65535 | -- | Effective immediately | Stop set | Ordinary user | |
P0D-10 ~ P0D-3 | Deceleration time 1-4 | 0~65535 | -- | Effective immediately | Stop set | Ordinary user | |
P0D-20 ~ P0D-35 | Instructions in paragraph i (1-16) | -6000~6000 | -- | Effective immediately | Stop set | Ordinary user | |
P0D-40~ P0D-55 | The running time of the i (1-16) segment | 0~65535 | 0.1s(min) | 50 | Effective immediately | Stop set | Ordinary user |
P0D-60 ~ P0D-75 | Acceleration and deceleration time of segment i (1-16) | 0- acceleration and deceleration time 1. Acceleration and deceleration time 1 2- Acceleration and deceleration time 2 3- Acceleration and deceleration time 3 4- Acceleration and deceleration time 4 | 1 | 0 | Effective immediately | Stop set | Ordinary user |