1. Interrupt fixed length instruction DVIT
1. Interrupt fixed length instruction DVIT
1.1. Instruction Description
1) The interrupt positioning instruction DVIT is used to accurately locate a fixed position after the signal.
2) After the DVIT command is activated, it first moves continuously at a fixed pulse frequency and direction until an interrupt signal is detected. After detecting the interrupt signal, output a fixed number of pulses at the current frequency and stop running.
3) At the beginning of movement and when outputting a fixed number of pulses, the acceleration and deceleration process is carried out according to the set acceleration and deceleration time.
4) The instruction does not require additional activation of interrupts or activation of interrupts, only the correct interrupt number needs to be entered to activate the DVIT instruction.
5) The direction of instruction transmission is determined by the positive or negative frequency at the time of activation. During operation, it will respond to changes in frequency but will not reverse or pause.
6) When the enable is normally open, it responds to the interrupt signal throughout the entire process. When the enable bit is enabled, it only responds to the interrupt signal when the enable bit is ON.
1.2. Instructions for use
The X points corresponding to the interrupt number are shown below, and X points outside this range cannot trigger interrupt positioning.
The interrupt numbers that can be used for DVIT instruction multi pulse are 0 to 34, corresponding to the three types of the first six high-speed X ports.
| Interrupt Number | Interrupt Event |
|---|---|
| K0 | X000 rising edge trigger |
| K1 | X000 falling edge trigger |
| K2 | X000 edge change trigger |
| K3 | X001 rising edge trigger |
| K4 | X001 falling edge trigger |
| K5 | X001 edge change trigger |
| K8 | X002 rising edge trigger |
| K9 | X002 falling edge trigger |
| K10 | X002 edge change trigger |
| K11 | X003 rising edge trigger |
| K12 | X003 falling edge trigger |
| K13 | X003 edge change trigger |
| K14 | X004 rising edge trigger |
| K15 | X004 falling edge trigger |
| K16 | X004 edge change trigger |
| K17 | X005 rising edge trigger |
| K18 | X005 falling edge trigger |
| K19 | X005 edge change trigger |
| K20 | X006 rising edge trigger |
| K21 | X006 falling edge trigger |
| K22 | X006 edge change trigger |
| K23 | X007 rising edge trigger |
| K24 | X007 falling edge trigger |
| K25 | X007 edge change trigger |
| K26 | X arbitrary address rising edge trigger |
| K27 | X arbitrary address falling edge trigger |
| K28 | X arbitrary address edge change trigger |
| K29 | Y arbitrary address rising edge trigger |
| K30 | Y arbitrary address falling edge trigger |
| K31 | Y arbitrary address edge change trigger |
| K32 | M arbitrary address rising edge trigger |
| K33 | M arbitrary address falling edge trigger |
| K34 | M arbitrary address edge change trigger |
| register | pulse output |
|---|---|
| M8134 | Y000 |
| M8135 | Y001 |
| M8136 | Y002 |
| M8137 | Y003 |
| register | pulse output |
|---|---|
| M8138 | Y004 |
| M8139 | Y005 |
| M8140 | Y006 |
| M8141 | Y007 |
| M8142 | Y010 |
| M8143 | Y011 |
| register | pulse output |
|---|---|
| D8140(D8141) | Y000 |
| D8142(D8143) | Y001 |
| D8144(D8145) | Y002 |
| D8146(D8147) | Y003 |
| register | pulse output |
|---|---|
| D8148(D8149) | Y004 |
| D8150(D8151) | Y005 |
| D8152(D8153) | Y006 |
| D8154(D8155) | Y007 |
| D8156(D8157) | Y010 |
| D8158(D8159) | Y011 |
| register | pulse output |
|---|---|
| M8070 | Y000 |
| M8071 | Y001 |
| M8072 | Y002 |
| M8073 | Y003 |
| register | pulse output |
|---|---|
| M8074 | Y004 |
| M8075 | Y005 |
| M8076 | Y006 |
| M8077 | Y007 |
| M8078 | Y010 |
| M8079 | Y011 |
1.2.1. Attention:
For high-speed pulse output, it is designed for external high-speed devices. To count the pulses, only a high-speed pulse input counter can be used, and internal counters or Y edge changes cannot be used for counting. When used as a high-speed output, it cannot be used as a regular output port;
The OFF time of transistors has the characteristic of being prolonged under light loads. So, when responsiveness is required, please design a load resistor to increase the load current when the load is lighter;
For pulse output Y0, the number of pulses is accumulated in register D8140 (D8141), where D8141 stores the high 16 bits and D8140 stores the low 16 bits;
The pulse accumulation count registers (D8140~D8158) are important registers that can be read and written. When a new value is written, the count will be added or subtracted based on the new value;
Due to the directional pulse output of this instruction, the pulse accumulation count registers (D8140~D8158) count according to the direction;
When outputting high-speed pulses, the values in the pulse accumulation count registers (D8140~D8158) are discontinuous and constantly changing. When used for judgment, please use size comparison instead of equal judgment;
When the pulse command is used to output port Y, the Y port cannot be used for other purposes, that is, ordinary commands cannot perform ON or OFF operations on the Y port anymore.
If the frequency of multiple pulse exceeds 200K, a pull-up resistor needs to be added to the pulse output port to ensure that the pulse waveform is not distorted. The pull-up voltage is 24V, and the recommended pull-up resistor is 1K.
1.3. The valid operands of the instruction
| Input/Output | Data Type | operand | Description |
|---|---|---|---|
| F | 32-bit integer | D/CV/K/H/FD, bit composite word (X/Y/M/C/T/S), local variable (LD) | frequency |
| P | 32-bit integer | D/CV/K/H/FD, bit composite word (X/Y/M/C/T/S), local variable (LD) | quantity |
| AC | 16 bit unsigned integer | D/CV/TV/AI/AO/K/H/V/Z/FD, bit composite word (X/Y/M/C/T/S), local variable (LW) | acceleration time |
| OUT | ON/OFF | Y | Pulse |
| DIR | ON/OFF | Y | Direction |
| INT | 16 bit unsigned integer | K/H | Interrupt number |
1.4. Example
Command table:
NETWORK 000
LD M0
DVIT K10000 K20000 K0 Y002 Y001 K24
POP
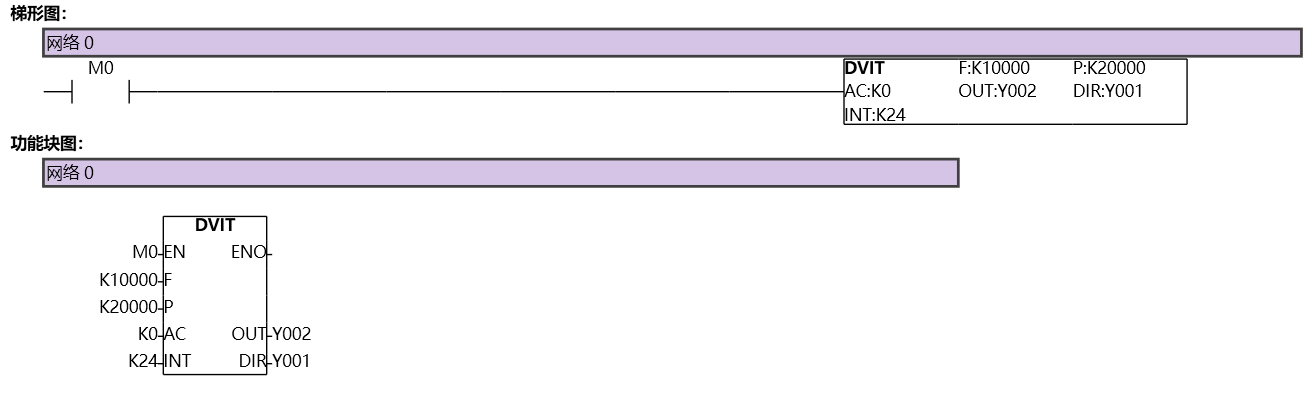
图1 DVIT